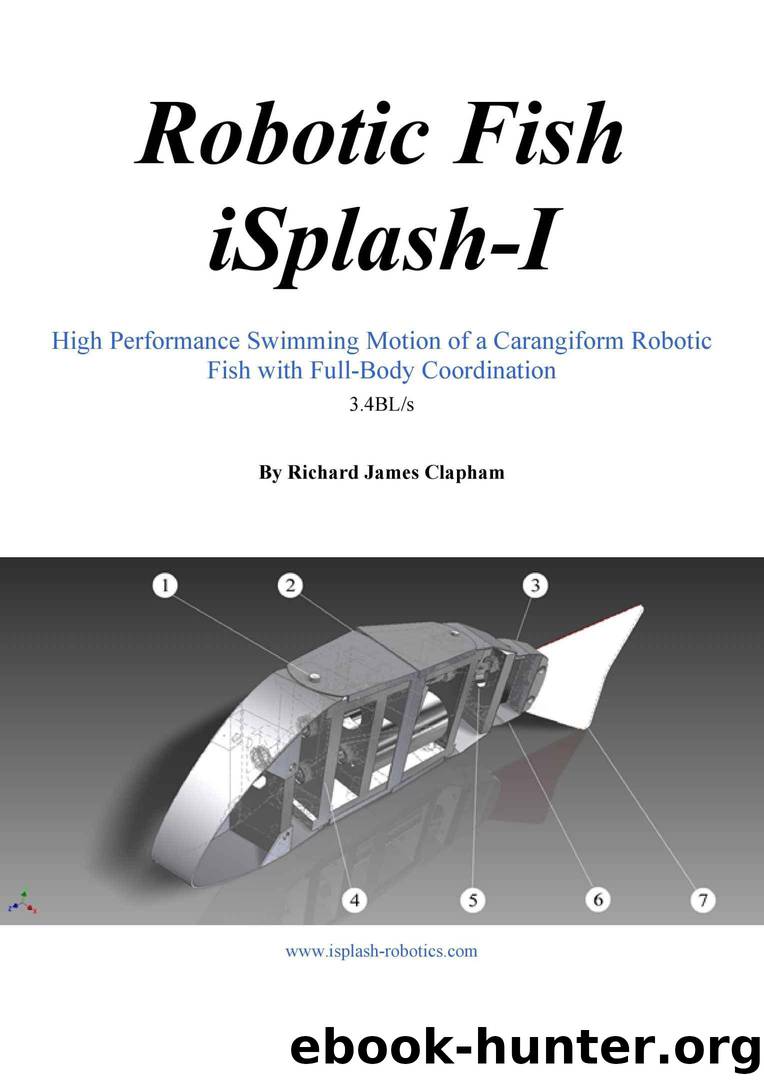
Robotic Fish iSplash-I: High Performance Swimming Motion of a Carangiform Robotic Fish with Full-Body Coordination (High Speed Robotics. Mechanical engneering ... for maximum velocity robot fish. Book 1) by Richard James Clapham
Author:Richard James Clapham
Language: eng
Format: mobi
Published: 2016-02-01T22:00:00+00:00
Increasing endurance is a desirable feature of a UV. Current robotic fish are still limited to short operational times as energy losses can be produced in many stages of the mechanical transfer. Recent designs have found it is advantageous to utilize a single electrical motor for actuation [8]. The classical actuator is still the most effective way of providing power at high frequencies and reduces energy consumption over multilink discrete assemblies. Mass and volume distribution are key principles of stability in the horizontal and vertical planes. A single actuator power transmission system can be positioned in the optimum location. In contrast multilink servo assemblies are limited as mass and volume are confined to the posterior.
Download
This site does not store any files on its server. We only index and link to content provided by other sites. Please contact the content providers to delete copyright contents if any and email us, we'll remove relevant links or contents immediately.
The Mikado Method by Ola Ellnestam Daniel Brolund(26286)
Hello! Python by Anthony Briggs(25212)
Secrets of the JavaScript Ninja by John Resig Bear Bibeault(24438)
Kotlin in Action by Dmitry Jemerov(23531)
The Well-Grounded Java Developer by Benjamin J. Evans Martijn Verburg(22873)
Dependency Injection in .NET by Mark Seemann(22660)
OCA Java SE 8 Programmer I Certification Guide by Mala Gupta(21423)
Algorithms of the Intelligent Web by Haralambos Marmanis;Dmitry Babenko(20266)
Grails in Action by Glen Smith Peter Ledbrook(19336)
Adobe Camera Raw For Digital Photographers Only by Rob Sheppard(17050)
Sass and Compass in Action by Wynn Netherland Nathan Weizenbaum Chris Eppstein Brandon Mathis(16362)
Secrets of the JavaScript Ninja by John Resig & Bear Bibeault(14074)
Test-Driven iOS Development with Swift 4 by Dominik Hauser(12248)
Jquery UI in Action : Master the concepts Of Jquery UI: A Step By Step Approach by ANMOL GOYAL(11527)
A Developer's Guide to Building Resilient Cloud Applications with Azure by Hamida Rebai Trabelsi(10638)
Hit Refresh by Satya Nadella(9216)
The Kubernetes Operator Framework Book by Michael Dame(8575)
Exploring Deepfakes by Bryan Lyon and Matt Tora(8428)
Robo-Advisor with Python by Aki Ranin(8372)
